Brushless DC Machines¶
Brushless DC Machines (BLDC) machines are used in all kinds of applications. They evolved from brushed DC machines. These machines work like this.
As the motor turns the brushes (actual mechanical switches) change the direction of the magnetic fields as the rotor turns.
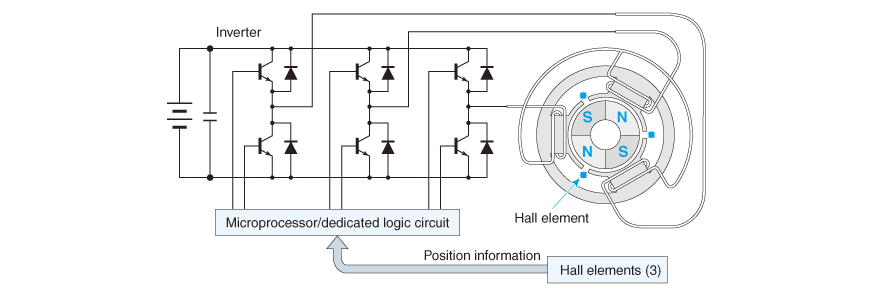
The first brushless variety use electronics to switch in the same way, using Hall effect sensors to detect where to switch. They changed the rotor have permanent magnets instead of vice versa.
Hall effect sensors are based on the Hall effect, where if you have a semiconductor a voltage is induced by the Lorentz force, $\mathbf F = q(\mathbf v \times \mathbf B + \mathbf E)$. They signal a computer or other electronics when the rotor magnet passes by.

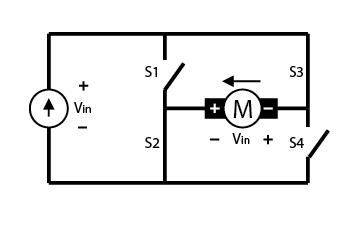
Electronic control of the currents in the stator allowed for a lot more control. The idea is that a computer (or other electronics) does the switching. You can use all kinds of different circuits for this, but the most common is an H bridge.